“
本文主要介绍内存管理机制:物理内存与虚拟内存的关系,Linux内存管理机制,Python内存管理机制,Nginx内存管理机制,环形缓冲区机制,以及TC-malloc内存分配器的Andriod管理机制的简单介绍。
”
一. 物理内存与虚拟内存
众所周知,程序需要加载到物理内存才能运行,多核时代会出现多个进程同时操作同一物理地址的情况,进而造成混乱和程序崩溃。计算机当中很多问题的解决都是通过引入中间层,为解决物理内存使用问题,虚拟内存作为中间层进入了操作系统,从此,程序不在直接操作物理内存,只能看到虚拟内存,通过虚拟内存,非常优雅的将进程环境隔离开来,每个进程都拥有自己独立的虚拟地址空间,且所有进程地址空间范围完全一致,也给编程带来了很大的便利,同时也提高了物理内存的使用率,可同时运行更多的进程。
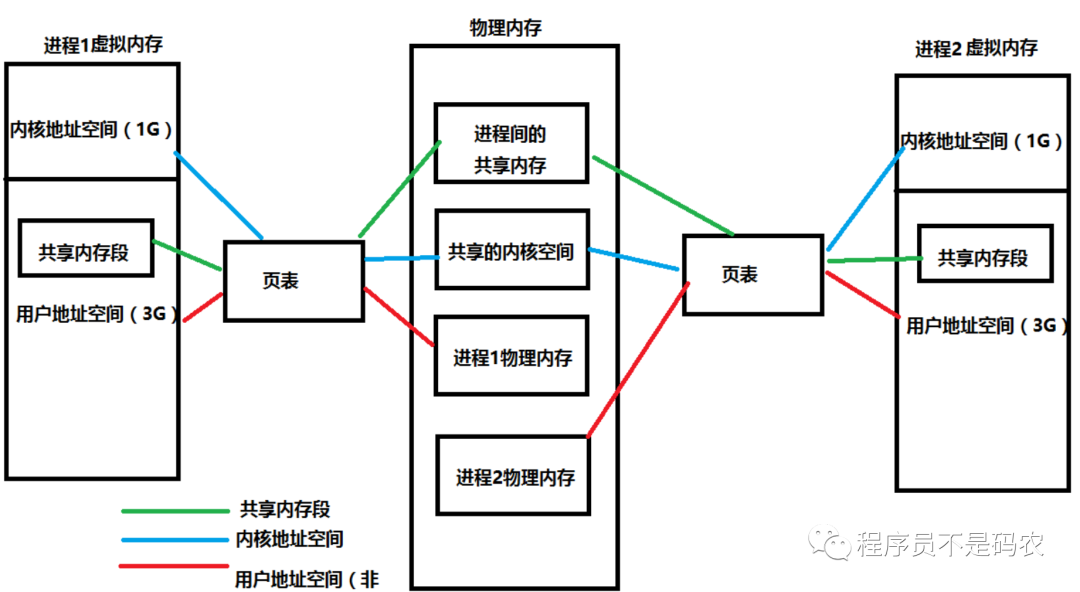
物理内存和虚拟内存之间的关系
虚拟内存以页为单位进行划分,每个页对应物理内存上的页框(通常大小为4KB),内存管理单元(MMU)负责将虚拟地址转换为物理地址,MMU中有一张页表来存储这些映射关系。
并非虚拟内存中所有的页都会分配对应的物理内存,为充分利用物理内存,保证尽可能多的进程运行在操作系统上,因此需要提高物理内存利用率,对于很少用到的虚拟内存页不分配对应的物理内存,只有用到的页分配物理内存。虽然从程序角度来看,虚拟内存为连续地址空间,但其实,它被分隔成多个物理内存碎片,甚至还有部分数据并不在内存中,而是在磁盘上。
当访问虚拟内存时,通过MMU寻找与之对应的物理内存,如果没有找到,操作系统会触发缺页中断,从磁盘中取得所缺的页并将其换入物理内存,并在页表中建立虚拟页与物理页的映射关系。
如果物理内存满了,操作系统会根据某种页面置换算法(比如LRU算法),将物理内存对应的页换出到磁盘,如果被换出的物理内存被修改过,则必须将其写回磁盘以更新对应的副本。
当进程创建时,内核为进程分配4G虚拟内存,此时,仅仅只是建立一个映射关系,程序的数据和代码都还在磁盘中,只有当运行时才换回物理内存。并且,通过malloc来分配动态内存时,也只分配了虚拟内存,并不会直接给物理内存,因此,理论上来说malloc可分配的内存大小应该是无限制的(实际当然会有很多算法进行限制)。
多进程使用同一物理内存图如下:
二. Linux内存管理机制
进程地址空间
进程地址空间分为内核空间(3G到4G)和用户空间(0到3G),如下图.
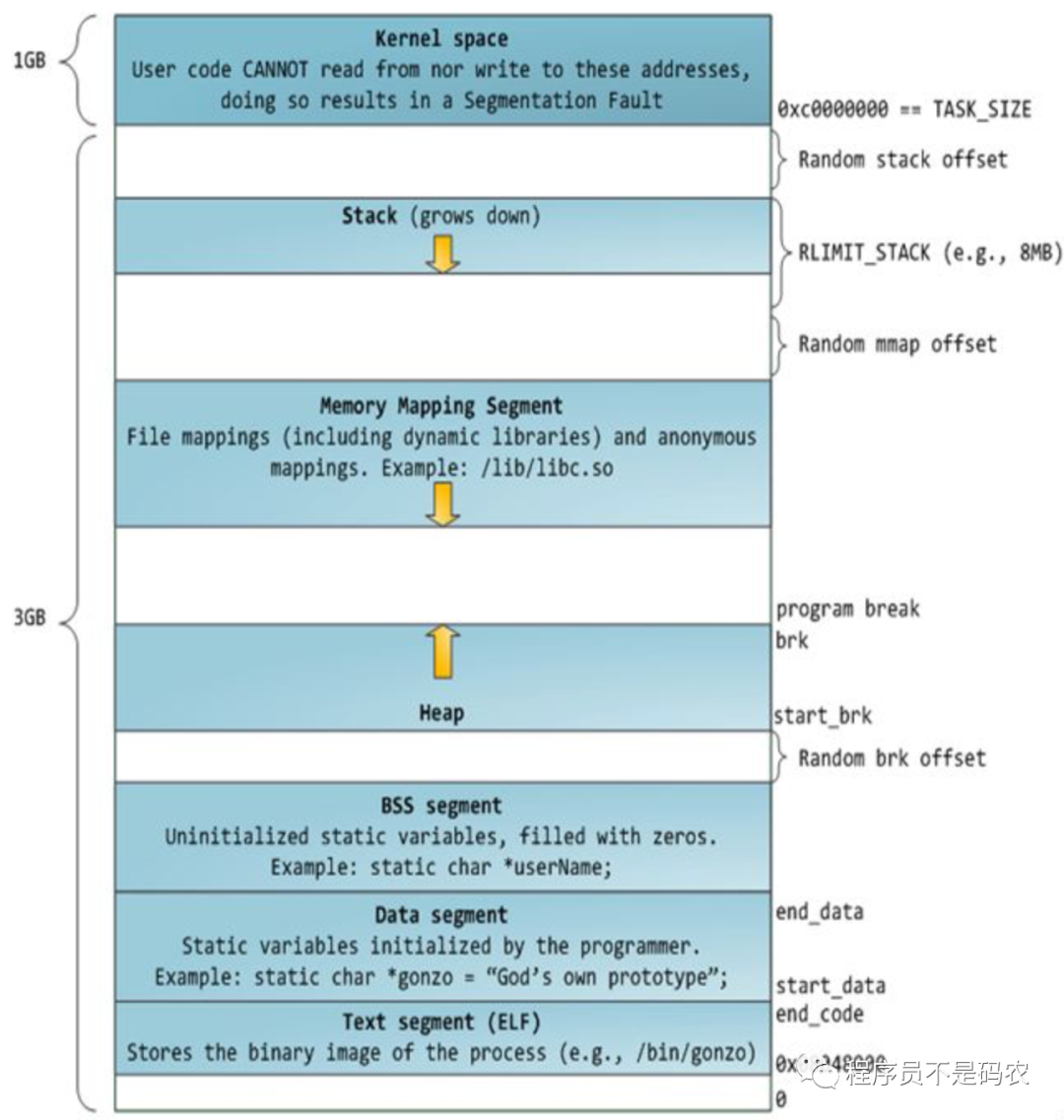
内核通过brk和mmap来分配(虚拟)内存,malloc/free底层实现即为brk, mmap和unmmap
当malloc内存小于128k时采用brk,其通过将数据段(.data)的地址指针_edata往高地址推来分配内存,brk分配的内存需要高地址内存全部释放后才会释放,当最高地址空间空闲内存大于128K时,执行内存紧缩操作。
当malloc内存大于128K时采用mmap,其在堆栈中间的文件映射区域(Memory Mapping Segment)找空闲虚拟内存,mmap分配的内存可单独释放。
每个进程都对应一个mm_struct结构体,即唯一的进程地址空间
// include/linux/mm.h
struct vm_area_struct {
struct mm_struct * vm_mm;
};
// include/linux/sched.h
struct mm_struct {
struct vm_area_struct *mmap; // vma链表结构
struct rb_root mm_rb; // 红黑树指针
struct vm_area_struct *mmap_cache; // 指向最近找到的虚拟区间
atomic_t mm_users; // 正在使用该地址的进程数
atomic_t mm_count; // 引用计数,为0时销毁
struct list_head mmlist; // 所有mm_struct结构体都通过mmlist连接在一个双向链表中
};
linux内核用struct page结构体表示物理页:
// include/linux/mm.h
struct page {
unsigned long flags; // 页标识符
atomic_t count; // 页引用计数
struct list_head list; // 页链表
struct address_space *mapping; // 所属的inode
unsigned long index; // mapping中的偏移
struct list_head lru; // LRU最近最久未使用, struct slab结构指针链表头变量
void *virtual; // 页虚拟地址
}
内存碎片与外存碎片
内存碎片
产生原因:分配的内存空间大于请求所需的内存空间,造成内存碎片
解决办法:伙伴算法,主要包括内存分配和释放两步:
-
内存分配:需满足两个条件,1) 大于请求所需内存;2)为最小内存块(如64K为一页)的倍数。比如,最小内存块为64K,若分配100K内存,则应分配64*2=128K内存大小。 -
内存释放:包含两步,1)释放内存;2)检查是否可与相邻块合并,直到没有可合并内存块。
接下来通过一张图来详细说明伙伴算法原理(From wiki),如下:
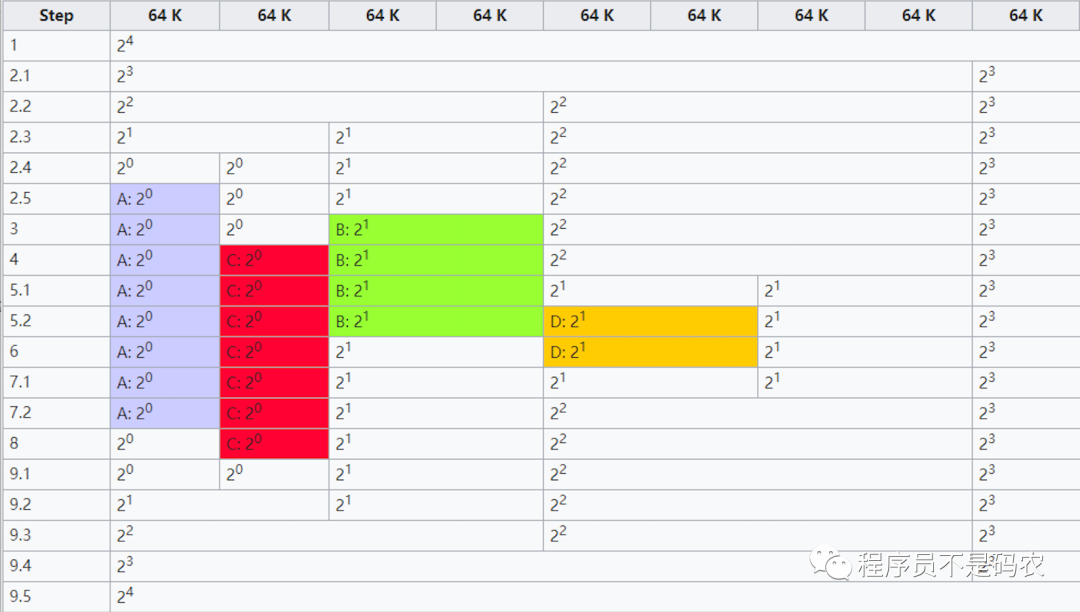
Step步骤详解(注意最左侧Step为步骤,ABCD申请者对应不同的颜色):
-
初始化内存,最小内存块为64K,分配1024KB(只截取部分进行说明) -
A申请34K内存,因此需64K内存块,步骤2.1 2.2 2.3 2.4都为对半操作,步骤2.5找到满足条件的块(64K),分配给A -
B申请66K内存,因此需要128K内存块,有现成的直接分配 -
C申请35K内存,需64K内存块,直接分配 -
D申请67K内存,需128K内存块,步骤5.1对半操作,步骤5.2分配 -
释放B内存块,没有相邻内存可合并 -
释放D内存块,步骤7.1释放内存,步骤7.2 与相邻块进行内存合并 -
A释放内存,不许合并内存 -
C释放内存,步骤9.1释放内存,步骤9.2-9.5进行合并,整块内存恢复如初
以上为伙伴算法原理,Linux关键代码在mm/page_alloc.c中,有兴趣读者可在内核源码中阅读细节,如下:
//mm/page_alloc.c
// 块分配, removing an element from the buddy allocator
// 再zone中找到一个空闲块,order(0:单页,1:双页,2:4页 2 ^ order)
static struct page * __rmqueue(struct zone *zone, unsigned int order)
{
}
// 块释放,处理合并逻辑
static int
free_pages_bulk(struct zone *zone, int count, struct list_head *list, unsigned int order) {
}
这里简单介绍云风实现的伙伴算法,实现思路:用数组实现完全二叉树来管理内存,树节点标记使用状态,在分配和释放中通过节点的状态来进行内存块的分离与合并,如下:
// 数组实现二叉树
struct buddy {
int level; // 二叉树深度
uint8_tree[1]; // 记录二叉树用来存储内存块(节点)使用情况,柔性数组,不占内存
};
// 分配大小为s的内存
int
buddy_alloc(struct buddy * self, int s) {
// 分配大小s的内存,返回分配内存偏移量地址(首地址)
int size;
if (s == 0) {
size = 1;
} else {
// 获取大于s的最小2次幂
size = (int)next_pow_of_2(s);
}
int length = 1 level;
if(size > length)
return -1;
int index = 0;
int level = 0;
while (index >= 0) {
//具体分配细节...
}
return -1;
}
// 释放内存并尝试合并
void
buddy_free(struct buddy * self, int offset) {
// 释放偏移量offset开始的内存块
int left = 0;
int length = 1 level;
int index;
for (;;) {
switch(self->tree[index]) {
case NODE_USED:
_combine(self, index); // 尝试合并
return;
case NODE_UNUSED:
return;
default:
// ...
}
}
}
外存碎片
产生原因:未被分配的内存,出现大量零碎不连续小内存,无法满足较大内存申请,造成外部碎片
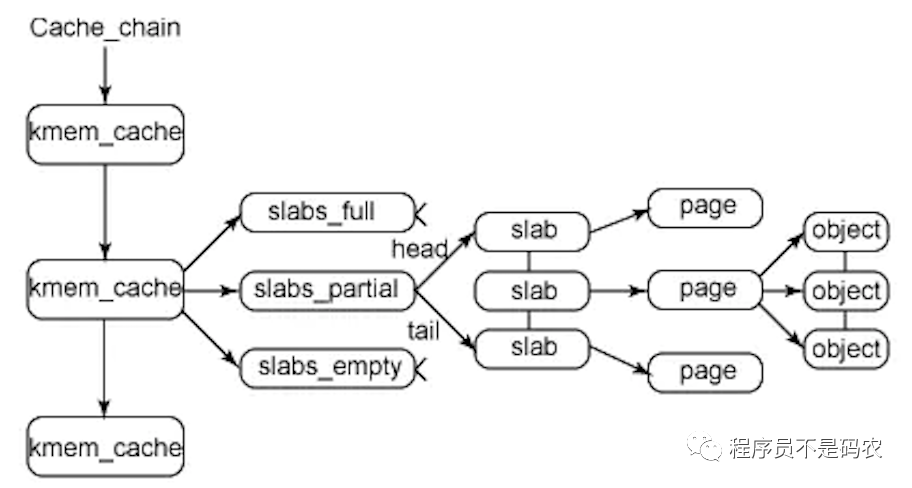
解决办法:采用slab分配器,处理小内存分配问题,slab分配器分配内存以字节为单位,基于伙伴系统分配的大内存进一步细分成小内存分配
slab分三种:slabs_full(完全分配的slab),slabs_partial(部分分配的slab),slabs_empty(空slab),一个slab分配满了之后就从slabs_partial删除,同时插入到slab_fulls中。
slab两个作用:1)小对象分配,不必每个小对象分配一个页,节省空间;2)内核中一些小对象创建析构频繁,slab对小对象缓存,可重复利用一些相同对象,减少内存分配次数。(应用于内核对象的缓存)。
slab分配器基于对象(内核中数据结构)进行管理,相同类型对象归为一类,每当申请这样一个对象,slab分配器就从一个slab列表中分配一个这样大小的单元,当释放时,将其重新保存到原列表中,而不是直接返还给伙伴系统,避免内存碎片。slab分配对象时,会使用最近释放的对象的内存块,因此其驻留在cpu高速缓存中的概率会大大提高
三. Python内存管理机制
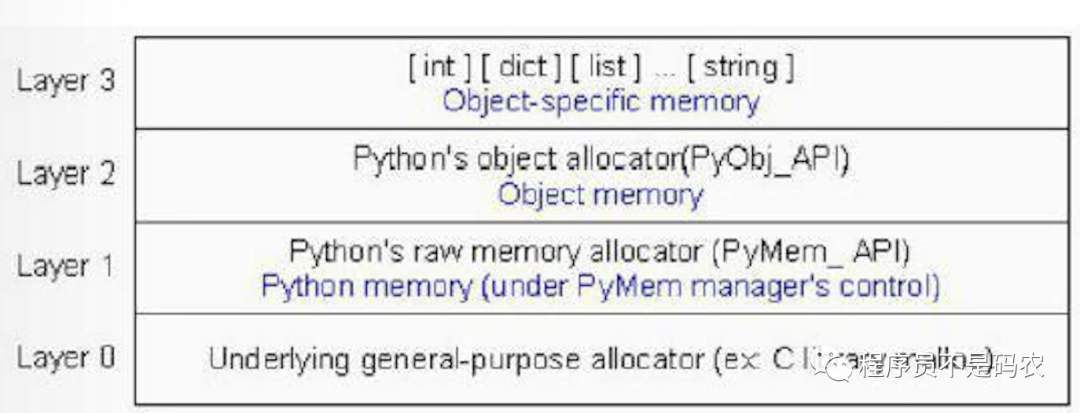
内存管理层次结构
-
Layer 0:操作系统提供的内存管理接口,比如malloc,free,python不能干涉这一层 -
Layer 1:封装malloc,free等接口PyMem_API,提供统一的raw memory管理接口,为了可移植性。 -
Layer 2:构建了更高抽象层次的内存管理策略(GC藏身之处) -
Layer 3:对象缓冲池
// 第1层 PyMem_Malloc通过一个宏PyMem_MALLOC实现
// pymem.h
PyAPI_FUNC(void *) PyMem_Malloc(size_t);
PyAPI_FUNC(void *) PyMem_Realloc(size_t);
PyAPI_FUNC(void *) PyMem_Free(size_t);
#define PyMem_MALLOC(n) ((size_t)(n) > (size_t)PY_SSIZE_T_MAX ? NULL
: malloc(((n) != 0) ? (n) : 1))
#define PyMem_MALLOC(n) ((size_t)(n) > (size_t)PY_SSIZE_T_MAX ? NULL
: realloc(((n) != 0) ? (n) : 1))
#define PyMem_FREE free
// Type-oriented memory interface 指定类型
#define PyMem_New(type, n)
( ((size_t)(n) > PY_SSIZE_T_MAX / sizeof(type)) ? NULL :
( (type*)PyMem_Malloc((n) * sizeof(type))) ) )
#define PyMem_NEW(type, n)
( ((size_t)(n) > PY_SSIZE_T_MAX / sizeof(type)) ? NULL :
( (type*)PyMem_MALLOC((n) * sizeof(type))) ) )
小块空间的内存池
Python内存池可视为一个层次结构,自下而上分为四层:block,pool,arena和内存池(概念),其中bock, pool, arena在python中都能找到实体,而内存池是由所有这些组织起来的一个概念。
Python针对小对象(小于256字节)的内存分配采用内存池来进行管理,大对象直接使用标准C的内存分配器malloc。
对小对象内存的分配器Python进行了3个等级的抽象,从上至下依次为:Arena,Pool和Block。即,Pool由Block组成,Arena由Pool组成。
Block
block内存大小值被称为size class, 大小为:[8, 16, 24, 32, 40, 48 … 256],(8*n),内存管理器的最小单元,一个Block存储一个Python对象。
// obmalloc.c
// 8字节对齐
#define ALIGNMENT 8
#define ALIGNMENT_SHIFT 3
#define ALIGNMENT_MASK (ALIGNMENT - 1)
// block大小上限为256,超过256KB,则交由第一层的内存管理机制
#define SMALL_REQUEST_THRESHOLD 256
#define NB_SMALL_SIZZE_CLASSES (SMALL_REQUEST_THREASHOLD / ALIGNMENT)
// size class index 转换到 size class
#define INDEX2SIZE(I) (((unit) (I)) + 1)
// sizes class 转换到size class index
size = (uint )(nbytes - 1) >> ALIGMENT_SHIFT;
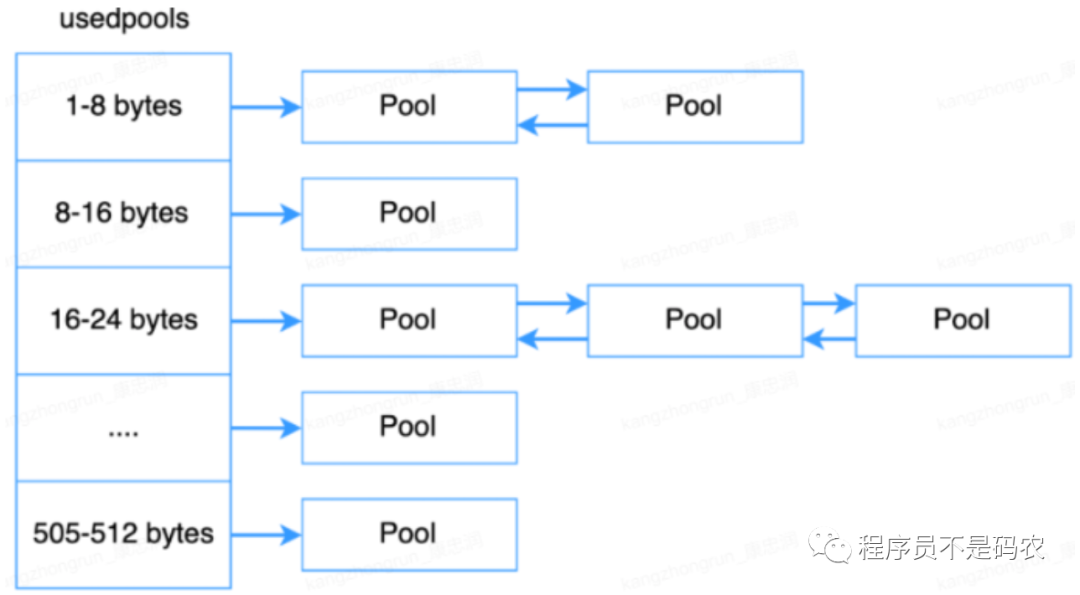
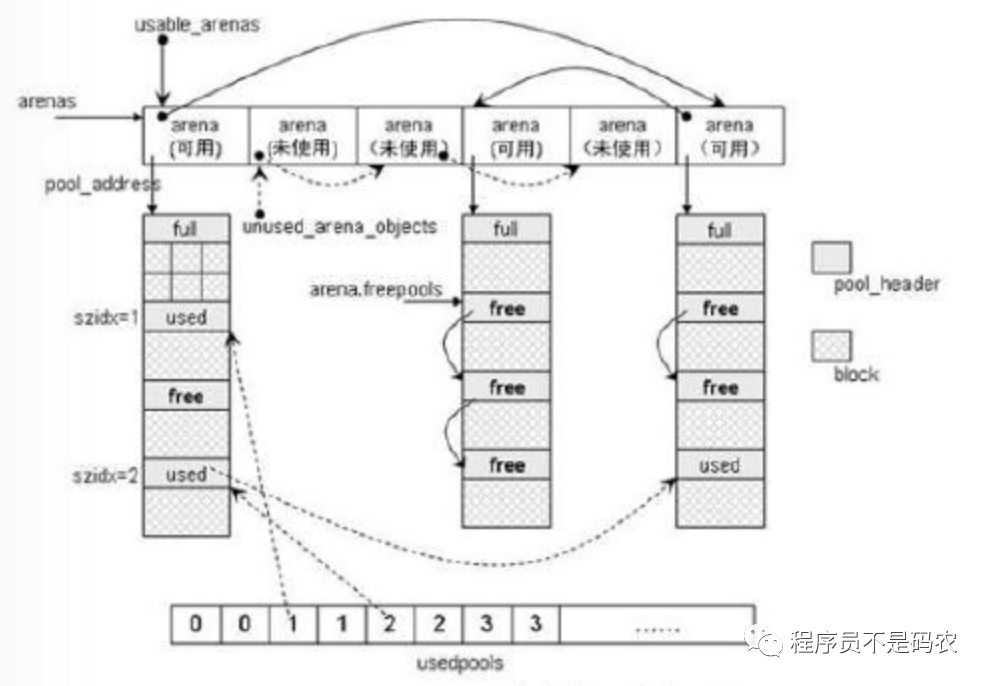
小于256KB的小块内存分配如下图。

如果申请内存大小为28字节,则PyObject_Malloc从内存池中分配32字节的block,size class index为3的pool(参考上图)。
Pool
Pool为一个双向链表结构,一系列Block组成一个Pool,一个Pool中所有Block大小一样;一个Pool大小通常为4K(一个虚拟/系统内存页的大小)。
一个小对象被销毁后,其内存不会马上归还系统,而是在Pool中被管理着,用于分配给后面申请的内存对象。Pool的三种状态
-
used状态:Pool中至少有一个Block已被使用,且至少还有一个Block未被使用,存在usedpools数组中。 -
full状态:Pool中所有的block都已经被使用,这种状态的Pool在Arena中,但不再Arena的freepools链表中 -
empty状态:Pool中所有的Block都未被使用,处于这个状态的Pool的集合通过其pool_head中的nextpool构成一个链表,表头为arena_object中的freepools
// obmalloc.c
#define SYSTEM_PAGE_SIZE (4 * 1024)
#define SYSTEM_PAGE_SIZE_MASK (SYSTEM_PAGE_SIZE - 1)
// 一个pool大小
#define POOL_SIZE SYSTEM_PAGE_SIZE
#define POOL_SIZE_MASK SYSTEM_PAGE_SIZE_MASK
/*pool for small blocks*/
struct pool_header {
union {
block *_padding;
uint count; }ref; // 分配的block数量
block *freeblock; // 指向pool中可用block的单向链表
struct pool_header *nextpool; // 指向下一个
struct pool_header *prevpool; // 指向上一个
uint arenaindex;
// 记录pool保存的block的大小,一个pool中所有block都是szidx大小
// 和size class index联系在一起
uint szidx;
uint nextoffset;
uint maxnextoffset;
};
typedef struct pool_header *poolp;
拥有相同block大小的pool通过双向链表连接起来,python使用一个数组usedpools来管理使用中的pool
以下为Python内存分配部分代码:
// obmalloc.c
typedef uchar block;
void *
PyObject_Malloc(sizes_t nbytes)
{
block *bp; // 指向从pool中取出第一块block的指针
poolp pool; // 指向一块4kb内存
poolp next;
uint size;
// 小于SMALL_REQUEST_THRESHOLD 使用Python的小块内存的内存池,否则走malloc
if ((nbytes - 1) // 根据申请内存的大小获得对应的获得size class index, 从usedpools中取pool
size = (uint)(nbytes - 1) >> ALIGNMENT_SHIFT;
pool = usedpools[size + size];
// 如果usedpools中有可用pool, 使用这个pool来分配block$
if (pool != pool->nextpool) {
...
}
}
}
Arena
Arena是Python直接从操作系统分配和申请内存的单位,一个Arena为256KB,每个Arena包含64个Pool,Arena管理的内存是离散的,Pool管理的内存是连续的。同Pool,Arena也是一个双向链表结构。
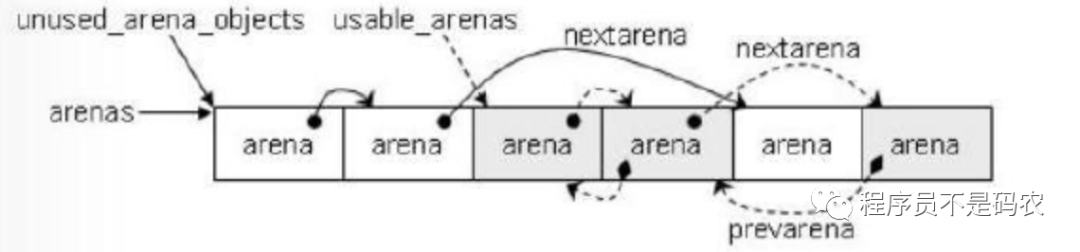
Python在分配Pool的时候优先选择可用Pool数量少的Arena进行内存分配,这样做的目的是为了让Pool更为集中,避免Arena占用大量空闲内存空间,因为Python只有在Arena中所有的Pool全为空时才会释放Arena中的内存。
Python中会同时存在多个Arena,由Arenas数组统一管理。
// obmalloc.c
#define ARENA_SIZE (256 // 256kb
// arena包含arena_object及其管理的pool集合,就如同pool和pool_header一样
struct arena_object {
uintptr_t address; // arena地址
block* pool_address; // 下一个pool地址
uint nfreepools;
uint ntotalpools;
struct pool_header* freepools; // 可用pool通过单链表连接
struct arena_object* nextarena;
struct arena_object* prearena;
};
// arenas管理着arena_object的集合
static struct arena_object* arenas = NULL;
// 未使用的arena_object链表
static struct arena_object * unused_arena_objects = NULL;
// 可用的arena_object链表
static struct arena_object * usable_arenas = NULL;
static struct arena_object * nwe_arena(void)
{
struct arena_object * arenaobj;
uint excess;
// 判断是否需要扩充“未使用的”arena_object列表
if (unused_arena_objects == NULL) {
// 确定本次需要申请的arena_object的个数,并申请内存
numarenas = maxarenas ? maxarenas 1 : INITIAL_ARENA_OBJECTS;
...
}
// 从unused_arena_objects中取出一个未使用的arena_object
arenaobj = unused_arena_objects;
unused_arena_objects = arenaobj->nextarena;
// 建立arena_object和pool的联系
arenaobj->address = (uptr)address;
...
return arenaobj;
}
内存池全景图
四. Nginx内存管理机制
在介绍Nginx内存管理之前,先参照Nginx实现一个简单的内存池,结构图如下:
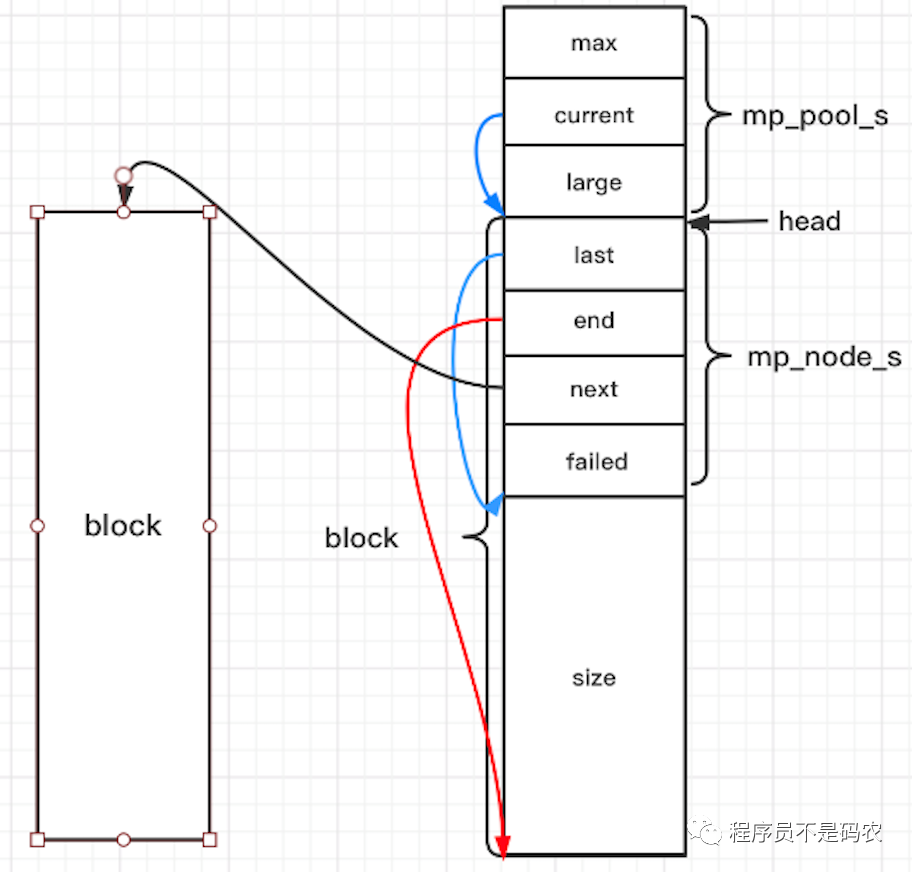
其中,mp_pool_s为内存池的结构体头,包含内存池的一些全局信息,block为小块内存块,每一个block有一个mp_node_s结构体,也即mp_pool_s通过链表将所有的block连接起来进行管理,而大块内存由mp_large_s进行分配。申明的数据结构如下:
// 结构体
// 大块内存结构体
struct mp_large_s {
struct mp_large_s *next;
void *alloc;
};
// 小块内存节点,小块内存构成一个链表
struct mp_node_s {
unsigned char *last; // 下一次内存从此分配
unsigned char *end; // 内存池结束位置
struct mp_node_s *next; // 指向下一个内存块
size_t failed; // 改内存块/node分配失败的次数
};
// 内存池结构
struct mp_pool_s {
size_t max; // 能直接从内存池中申请的最大内存,超过需要走大块内存申请逻辑
struct mp_node_s *current; // 当前分配的node
struct mp_large_s *large; // 大块内存结构体
struct mp_node_s head[0]; // 柔性数组不占用大小,其地址为紧挨着结构体的第一个node
};
// 需要实现的接口
struct mp_pool_s *mp_create_pool(size_t size); // 创建内存池
void mp_destory_pool(struct mp_pool_s *pool); // 销毁内存池
void *mp_alloc(struct mp_pool_s *pool, size_t size); // 分配内存 对齐
void mp_free(struct mp_pool_s *pool, void *p); // 释放p节点内存
接下来介绍接口实现,先介绍一个接口函数posix_memalign,函数原型如下:
int posix_memalign(void**memptr, size_t alignment, size_t size);
/* memptr: 分配好的内存空间的首地址
alignment: 对齐边界,Linux中32位系统8字节,64位系统16字节,必须为2的幂
size: 指定分配size字节大小的内存
*/
其功能类似malloc,不过其申请的内存都是对齐的。
内存池相关接口实现如下(只贴出部分代码,完整代码私信我)
// 创建并初始化内存池
struct mp_pool_s *mp_create_pool(size_t size) {
struct mp_pool_s *p;
// 分配内存池内存:mp_pool_s + mp_node_s + size
int ret = posix_memalign((void**)&p), MP_ALIGNMENT, size + sizeof(struct mp_pool_s) + sizeof(struct mp_node_s));
if (ret) { return NULL; }
// 可从内存池申请的最大内存
p->max = (size p->current = p->head; // 当前可分配的第一个节点mp_node_s
//一些初始化工作
return p;
}
// 销毁内存池
void mp_destroy_pool(struct mp_pool_s *pool) {
struct mp_node_s *h, *n;
struct mp_large_s *l;
// 销毁大块内存
for (l = pool->large; l; l = l->next) { /*...*/}
// 销毁小块内存
h = pool->head->next;
while (h) {/*...*/}
free(pool);
}
// mp_alloc 分配内存
void *mp_alloc(struct mp_pool_s *pool, size_t size) {
if (size max) { // 小块内存分配
p = pool->current;
do {
/*...不断寻找下一个可用节点*/
p = p->next; // 不够则找下一个节点
} while (p);
// 内存池中所有节点内存都不以满足分配size内存,需要再次分配一个block
return mp_alloc_block(pool, size);
}
return mp_alloc_large(pool, size); // 大块内存分配
}
// 大块节点内存释放
void mp_free(struct mp_pool_s *pool, void *p) {
struct mp_large_s *l;
for (l = pool->large; l; l = l->next) {
if (p == l->alloc) {
free(l->alloc);
//...
}
}
}
有了上面简化版,接下来看Nginx中内存管理就比较清晰的,其原理跟上述内存池一致,先上一张图:
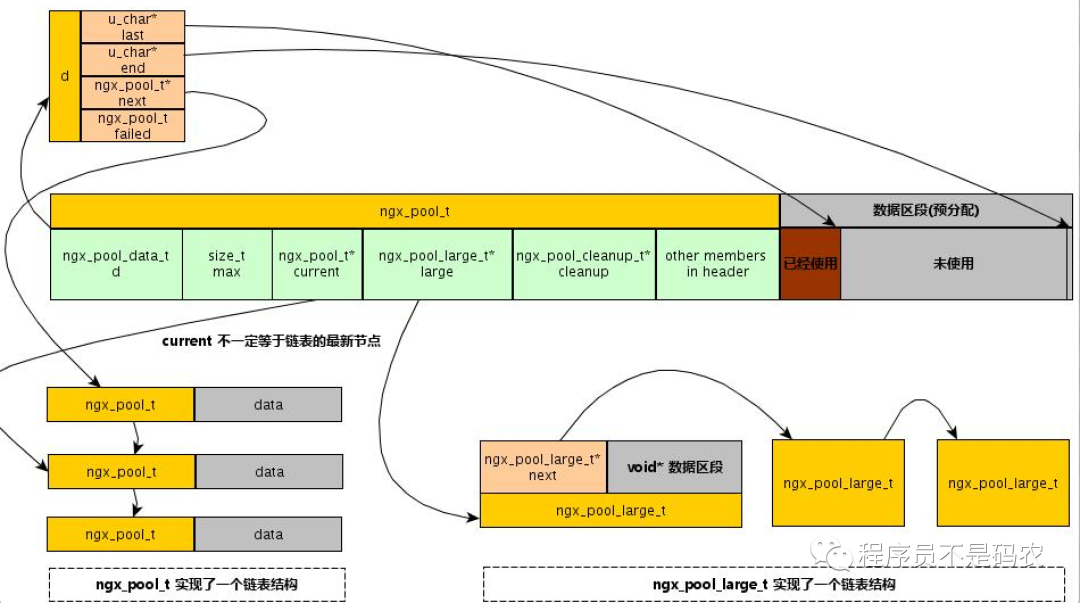
以下为Nginx实现,源代码主要在src/core/ngx_palloc.h/c两个文件中
// 内存块结构体,每个内存块都有,在最开头的部分,管理本块内存
typedef struct {
u_char *last; // 可用内存的起始位置,小块内存每次都从这里分配
u_char *end; // 可用内存的结束位置
ngx_pool_t *next; // 写一个内存池节点
ngx_unit_t failed; // 本节点分配失败次数,超过4次,认为本节点满,不参与分配,满的内存块也不会主动回收
}ngx_pool_data_t;
// 大块内存节点
typedef struct ngx_pool_large_s ngx_pool_large_t;
struct ngx_pool_large_s {
ngx_pool_large_t *next; // 多块大内存串成链表,方便回收利用
void *alloc; // 指向malloc分配的大块内存
};
// nginx内存池结构体
// 多个节点串成的单向链表,每个节点分配小块内存
// max,current,大块内存链表旨在头节点
// 64位系统大小位80字节,结构体没有保存内存块大小的字段,由d.end - p得到
struct ngx_pool_s {
// 本内存节点信息
ngx_pool_data_t d;
// 下面的字段旨在第一个块中有意义
size_t max; // 块最大内存
ngx_pool_t *current; // 当前使用的内存池节点
ngx_chain_t *chain;
ngx_pool_large_t *large; // 大块内存
ngx_pool_cleanup_t *cleanup; // 清理链表头指针
ngx_log_t *log;
};
// 创建内存池
ngx_pool_t *ngx_create_pool(size_t size, ngx_log_t *log);
// 销毁内存池
// 调用清理函数链表,检查大块内存链表,直接free,遍历内存池节点,逐个free
void ngx_destroy_pool(ngx_pool_t *pool);
// 重置内存池,释放内存,但不归还系统
// 之前分配的内存块依旧保留,重置空闲指针位置
void ngx_reset_pool(ngx_pool_t *pool);
// 分配内存 8字节对齐,速度快,少量浪费 >4k则直接malloc分配大块内存
void *ngx_palloc(ngx_pool_t *pool, size_t size);
void *ngx_pnalloc(ngx_pool_t *pool, size_t size); // 不对齐
void *ngx_pcalloc(ngx_pool_t *pool, size_t size); // 对齐分配,且初始化
// 大块内存free
ngx_int_t ngx_pfree(ngx_pool_t *pool, void *p);
五. Ringbuffer环形缓冲区机制
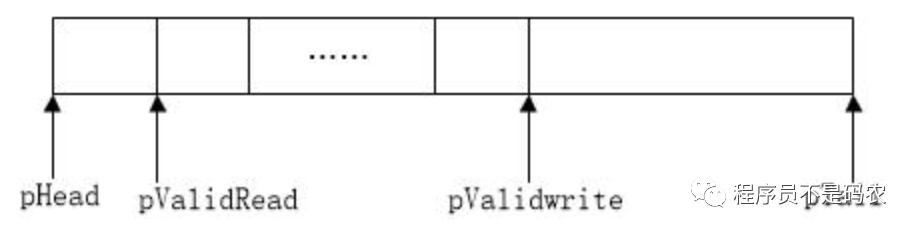
Ringbuffer的两个特性:1)先进先出;2)缓冲区用完,会回卷,丢弃久远数据,保存新数据。其结构如下图:
Ringbuffer的好处:1)减少内存分配进而减少系统调用开销;2)减少内存碎片,利于程序长期稳定运行。
应用场景:服务端程序收到多个客户端网络数据流时,可先暂存在Ringbuffer,等收到一个完整数据包时再读取。
Linux 5.1合入了一个新的异步IO框架和实现:io_uring, io_uring设计了一对共享的RingBuffer用于应用和内核之间的通信,其中,针对提交队列(SQ),应用是IO提交的生产者(producer),内核是消费者(consumer);反过来,针对完成队列(CQ),内核是完成事件的生产者,应用是消费者。
以下为一份简单Ringbuffer实现:
// ringbuffer.c
#define BUFFER_SIZE 16 // 缓冲区的长度
static u32 validLen; // 已使用的数据长度
static u8* pHead = NULL; // 环形存储区的首地址
static u8* pTail = NULL; // 环形存储区的尾地址
static u8* pValid = NULL; // 已使用的缓冲区首地址
static u8* pValidTail = NULL; // 已使用的缓冲区尾地址
// 初始化环形缓冲区
void init Ringbuffer(void) {
if (pHead == NULL) pHead = (u8*)malloc(BUFFER_SIZE);
pValid = pValidTail = pHead;
pTail = pHead + BUFFER_SIZE;
validLen = 0;
}
// 向缓冲区写入数据,buffer写入数据指针,addLen写入数据长度
int writeRingbuffer(u8* buffer, u32 addLen) {
// 将数据copy到pValidTail处
if (pValidTail + addLen > pTail) // ringbuffer回卷
{
int len1 = addLen - pValidTail;
int len2 = addLen - len1;
memcpy(pValidTail, buffer, len1);
memcpy(pHead, buffer + len1, len2);
pValidTail = pHead + len2; // 新的有效数据区结尾指针
} else {
memcpy(pValidTail, buffer, addLen);
pValidTail += addLen; // 新的有效数据结尾指针
}
// 重新计算已使用区的起始位置
if (validLen + addLen > BUFFER_SIZE) {
int moveLen = validLen + addLen - BUFFER_SIZE; // 有效指针将要移动的长度
if (pValid + moveLen > pTail) {
int len1 = pTail - pValid;
int len2 = moveLen - len1;
pValid = pHead + len2;
} else {
pValid = pValid + moveLen;
}
validLen = BUFFER_SIZE;
}else {
validLen += addLen;
}
return 0;
}
// 从缓冲区内取出数据,buffer读取数据的buffer,len长度
int readRingBuffer(u8* buffer, u32 len)
{
if (len > validLen) len = validLen;
if (pValid + len > pTail) { // 回卷
int len1 = pTail - pValid;
int len2 = len - len1;
memcpy(buffer, pValid, len1);
memcpy(buffer + len1, pHead, len2);
pValid = pHead + len2;
} else {
memcpy(buffer, pValid, len);
pValid = pValid + len;
}
validLen -= len;
return len;
}
六. TCMalloc(Thread-Caching Malloc)内存分配器
以下Tcmalloc和Andriod内存管理这两部分只做简单介绍。
tcmalloc优点:内存分配效率高,运行速度快,稳定性强,能够有效降低系统负载;
应用场景:多核,高并发,多线程
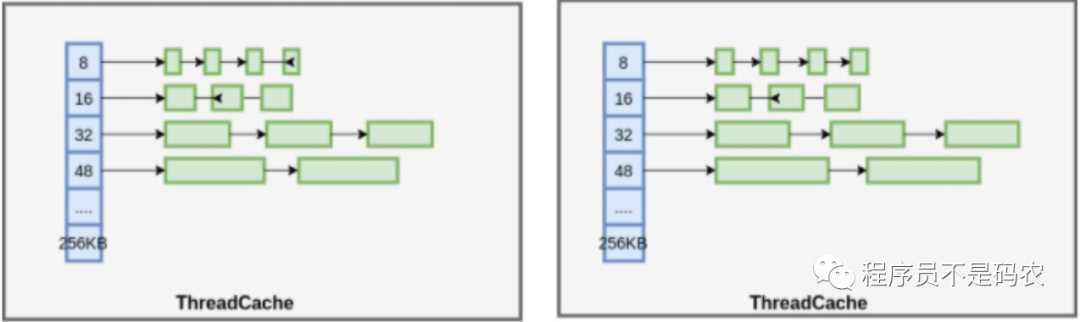
tcmalloc内存申请流程:
-
ThreadCache对象不够,就从CentralCache中批量申请 -
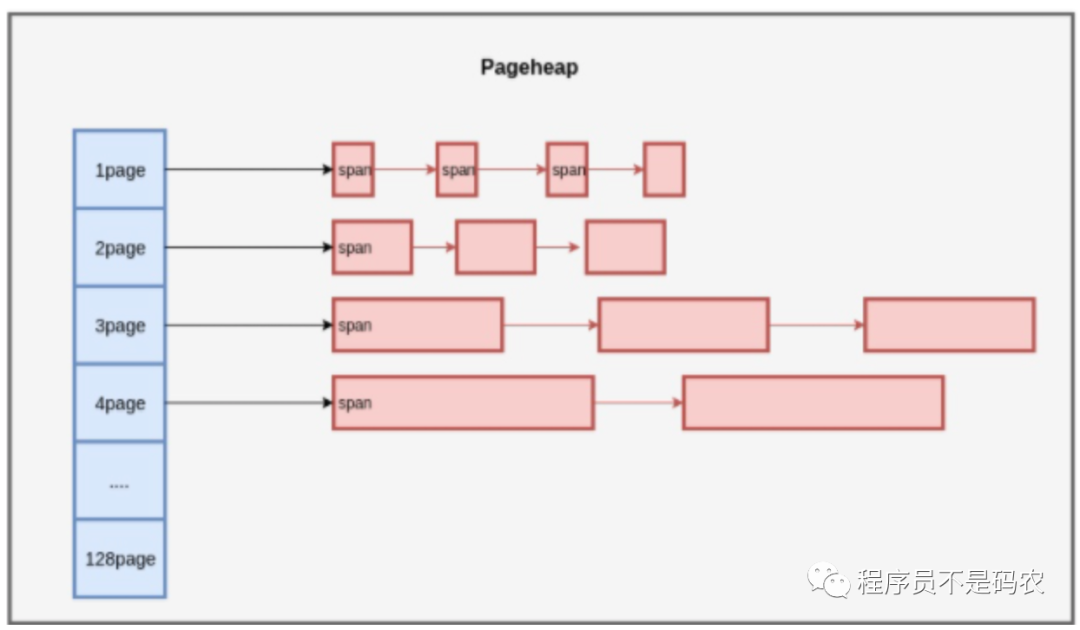
CentralCache不够,从PageHeap申请Span -
PageHeap没有适合的Page,则向操作系统申请
tcmalloc释放流程:
-
ThreadCache释放对象积累到一定程度,就释放给CentralCache -
CentralCache中一个Span释放完全了,则把这个Span归还给PageHeap -
PageHeap发现一批连续的Page都释放了,则归还给操作系统
多个连续的Page组成Span, Span 中记录起始 Page 的编号,以及 Page 数量,大对象(>32k)直接分配Span,小对象(

七. Andriod内存管理机制
Q:Andriod的Java程序为什么容易出现OOM?
A:因为Andriod系统堆Dalvik的VM HeapSize做了硬性限制,当java进程申请的java空间超过阈值时,就会抛出OOM,这样设计的目的是为了让比较多的进程常驻内存,这样程序启动时就不用每次都重新加载到内存,能够给用户更快的响应。
Andriod系统中的应用程序基本都是Java进程。
Andriod内存管理机制
分配机制:
为每一个进程分配一个合理大小的内存块,保证每个进程能够正常运行,同时确保进程不会占用太多的内存;Andriod系统需要最大限度的让更多进程存活在内存中,以保证用户再次打开应用时减少应用的启动时间,提高用户体验。
回收机制:
当系统内存不足时,需要一个合理的回收再分配机制,以保证新的进程可以正常运行。回收时杀死那些正在占用内存的进程,OS需要提供一个合理的杀死进程机制。
参考
虚拟内存与物理内存的联系与区别 https://blog.csdn.net/lvyibin890/article/details/82217193
云风伙伴算法实现 https://github.com/cloudwu/buddy.git
Python源码分析 https://book.douban.com/subject/3117898/
ringbuffer c code https://blog.csdn.net/maowentao0416/article/details/81984269
https://zhuanlan.zhihu.com/p/29216091 tcmalloc图
tcmalloc官方文档 https://zhuanlan.zhihu.com/p/29216091